

摄像头图卡光箱增距镜,灯箱细分行业 —多年专注摄像头测试行业,为客户提供更多选择 —

扫地机摄像头标定 —— 精准导航的核心保障

扫地机的智能导航、避障与路径规划,全依赖摄像头捕捉环境信息的准确性。摄像头标定作为关键预处理步骤,通过修正镜头畸变、校准参数,让扫地机 “看得准、走得稳”,直接决定清洁效率与用户体验。
一、核心作用:为什么需要标定?
消除镜头畸变:摄像头镜头存在径向 / 切向畸变(如直线变曲线),标定后可还原真实环境轮廓,避免避障误判、路径偏移。
精准空间定位:通过标定获取摄像头内参(焦距、像素尺寸)与外参(安装位置、角度),让扫地机准确计算障碍物距离、自身位置。
提升功能可靠性:保障 SLAM 地图构建、悬崖检测、沿边清洁等核心功能的稳定性,减少漏扫、碰撞、跌落风险。
二、标定核心流程(简化版)
| 步骤 | 操作说明 | 核心目的 |
|---|---|---|
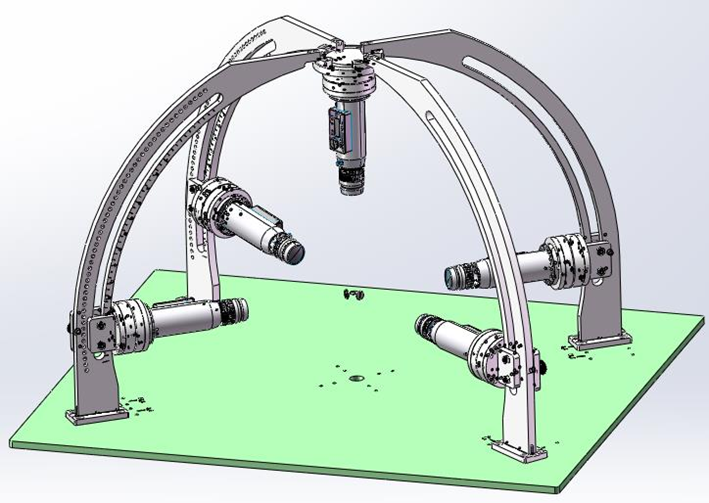
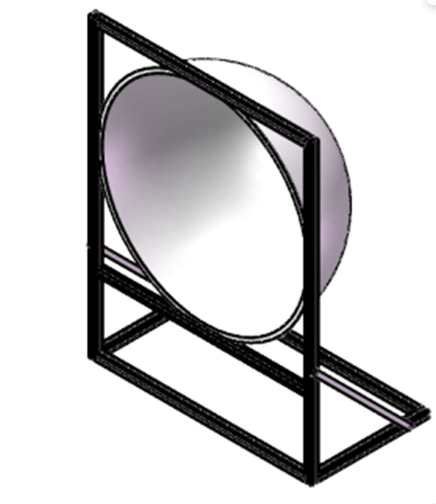
| 1. 准备工作 | 固定标定板(常用棋盘格),确保表面平整、光照均匀;将扫地机置于标定板前方合适距离(按产品规格要求)。 | 提供标准参考坐标,避免环境干扰。 |
| 2. 图像采集 | 启动标定程序,扫地机摄像头拍摄不同角度、不同距离的标定板图像(通常需采集 10-20 张)。 | 覆盖摄像头全视角,确保参数计算全面。 |
| 3. 参数计算 | 系统自动识别标定板特征点,通过算法计算镜头畸变系数、内参、外参等关键数据。 | 建立真实场景与图像像素的对应关系。 |
| 4. 参数应用 | 将标定结果写入扫地机系统,后续摄像头采集的图像会自动基于标定参数修正。 | 输出准确环境数据,支撑导航决策。 |
三、用户 / 厂商关注要点
1. 标定场景
出厂标定:厂商在生产环节完成基础标定,确保产品出厂精度;
后期标定:若扫地机碰撞、跌落导致摄像头移位,或使用中出现导航异常,需通过官方工具重新标定(部分机型支持用户自助标定,部分需专业人员操作)。
2. 核心优势
导航更精准:避免 “画圈漏扫”“靠墙碰撞”,清洁路径更规整;
避障更灵敏:准确识别桌椅腿、电线、门槛等障碍物,减少卡困;
适应能力强:在不同光照环境下,仍能保持稳定的图像识别效果。
3. 简单判断标定状态
若扫地机出现以下情况,可能需要重新标定:
频繁碰撞障碍物,或对明显障碍物无反应;
清洁时频繁偏离路径,或重复清洁同一区域;
悬崖检测异常(如误判台阶、或对台阶无反应)。
四、中英文核心术语对照
| 中文术语 | 英文翻译 |
|---|---|
| 扫地机摄像头标定 | Robot Vacuum Camera Calibration |
| 镜头畸变 | Lens Distortion |
| 内参标定 | Intrinsic Parameter Calibration |
| 外参标定 | Extrinsic Parameter Calibration |
| 棋盘格标定板 | Chessboard Calibration Target |
| SLAM 地图构建 | SLAM Map Construction |
| 避障检测 | Obstacle Avoidance Detection |
| 路径规划 | Path Planning |

