全景相机标定核心方法:适配不同场景的精准方案
时间:2025-12-05 10:51:53 作者:鑫诚光科技 点击:931次
全景相机标定的核心是校准镜头内参(焦距、畸变系数)、外参(镜头相对位置 / 角度)及多镜头同步性,以下主流方法按 “操作难度 + 适用场景” 分类,兼顾实用性与落地性,无表格更易快速理解:
借助黑白棋盘格的规则角点,通过算法精准计算镜头参数与多镜头相对位置,是行业内应用最广泛的基础标定方法。
打印标准棋盘格(常用 8×6 角点规格,提前确认角点数量与格子尺寸);
相机从不同角度、距离拍摄 20-50 张图像,确保覆盖所有镜头的全视野(包括边缘区域);
将图像导入 OpenCV、MATLAB 等工具,软件自动识别角点坐标;
算法计算内参、外参,生成校准参数后,拍摄测试场景验证拼接效果。
成本极低(普通打印纸即可制作靶标)、精度稳定、工具生态成熟,支持单镜头与多镜头同时标定,新手易上手。
消费级全景相机(旅游 vlog、日常拍摄设备)、入门级专业设备,适合实验室、桌面等室内标定场景。

用高对比度圆点阵列替代棋盘格,圆点中心识别抗遮挡、抗光照干扰能力更强,标定精度优于传统棋盘格。
选用标准圆点标定板(如 10×8 圆点阵列,圆点间距已知);
控制拍摄环境光照均匀,避免强光反光或阴影遮挡靶标,拍摄不同姿态的标定板图像;
导入专业软件解析圆点中心坐标,计算畸变系数与镜头外参;
通过多次迭代优化参数,确保多镜头拼接的一致性。
抗干扰性强(适配复杂光照、轻微遮挡场景)、标定精度更高,尤其适合大视场镜头的参数校准。
专业影视制作(VR 影片、全景纪录片)、工业检测设备,以及强光照、弱光照等复杂环境下的标定需求。

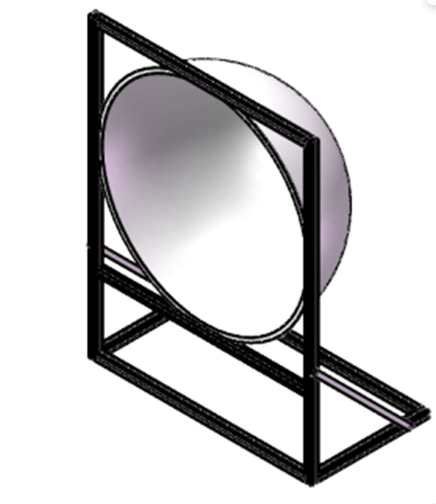
利用已知半径的标准球面靶标,一次性覆盖所有镜头的视野范围,快速校准多镜头间的拼接参数与相对角度。
放置标准球面靶标(表面带清晰标记点),确保相机所有镜头均可完整拍摄到球面;
相机固定位置,仅需拍摄 1-5 张球面图像,无需频繁调整拍摄角度;
软件自动识别球面上的标记点,计算各镜头的视野重叠区域与相对位置关系;
一键生成拼接融合参数,直接应用于相机系统。
标定效率极高(减少拍摄次数)、适配多镜头同步标定,能快速解决 360° 全景相机的拼接偏差问题。
360° 全景相机(安防监控、车载全景系统)、多镜头拼接设备,适合批量生产时的快速校准场景。

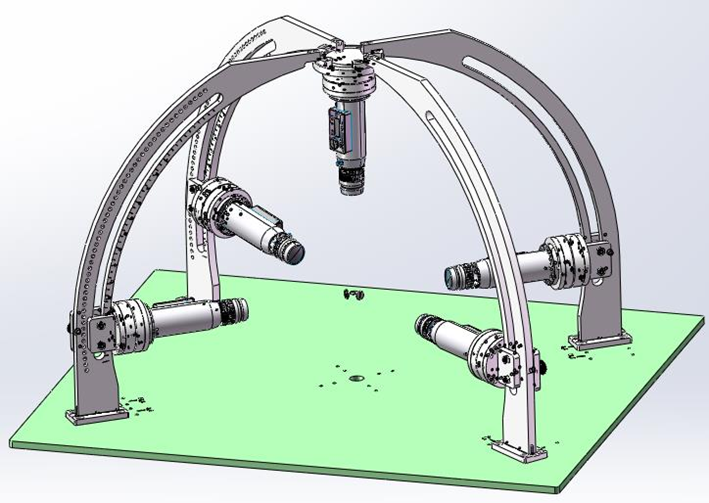
多面光源标定灯箱 (方法一)
6个方向带有格子图
框架:尺寸:1230*1230*2000mm ,由40黑色铝型材搭建,周边围挡黑色遮光布,治具高度:H=1300MM;
2.光源:
a:有效发光面:550*550,亮度:0-3000LX可调,色温:6500K;
b: 有6个光源,每个光源间距:1200mm;
c:以客户提供尺寸规格 制作图纸;
球形标定 (方法二)